1. Пропорциональный регулятор
Пропорциональный регулятор - это устройство, оказывающее управляющее воздействие u(t) на объект пропорционально его линейному отклонению e(t) от заданного состояния x0(t);
e(t)=x0(t)-x(t), где x(t) - состояние в данный момент времени;
u(t)=ke(t), где k - усиливающий коэффициент.
То есть, чем дальше робот отклоняется от заданного курса, тем активнее должны работать моторы, выравнивая его.
2. Движение по линии с одним датчиком освещенности с помощью П-регулятора
Движение по границе черного и белого тоже можно построить на П-регуляторе. Хотя внешне задача представляется решаемой только с помощью релейного регулятора, поскольку в системе присутствует всего два видимых человеческому глазу состояния: черное и белое. Но робот все видит иначе, для него отсутствует резкая граница между этими цветами. Можно сказать, он близорук и видит градиентный переход оттенков серого.
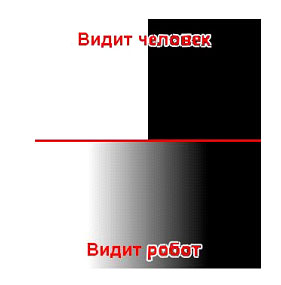
Вот это и поможет построить П-регулятор.
Определяя состояние работа как показания датчика освещенности, научимся оказывать пропорциональное управляющее воздействие на моторы по следующему закону: e=s1-grey, где s1 - текущие показания датчика, а grey - заданное значение.
 Коэффициент k (равный в данном примере 2) должен быть достаточно мал (от 1 до 3). Такой регулятор эффективно работает только для малых углов отклонения, поэтому робота надо ставить в направлении движения так, чтобы датчик оказался по левую сторону от черной линии. Нетрудно заметить, что движение по линии на П-регуляторе отличается плавность и на некоторых участках работ движется практически прямолинейно или точно повторяя изгибы линии.
Коэффициент k (равный в данном примере 2) должен быть достаточно мал (от 1 до 3). Такой регулятор эффективно работает только для малых углов отклонения, поэтому робота надо ставить в направлении движения так, чтобы датчик оказался по левую сторону от черной линии. Нетрудно заметить, что движение по линии на П-регуляторе отличается плавность и на некоторых участках работ движется практически прямолинейно или точно повторяя изгибы линии.
3. Калибровка датчика
Обратимся к числу 48, использованному в формуле. Это среднее арифметическое показание датчика освещенности на черном и на белом, например (40+56)/2=48. Однако показания датчиков часто меняются по разным причинам: другая поверхность, изменение общей освещенности в помещении, небольшая модификация конструкции и т.п. Поэтому имеет смысл научить робота самостоятельно вычислять среднее арифметическое, то есть значение границы белого и черного.
Способ I. Есть несколько способов выполнить калибровку датчика. В простейшем случае вместо вычисления среднего арифметического просто понижается значение белого. Робот снимает показание белого, вычитает из него некоторое предполагаемое значение (в данном примере на 8) и полученное число считает границей черного и белого.
 Другим способом аналогичную калибровку можно выполнить так:
Другим способом аналогичную калибровку можно выполнить так:



То есть, чем дальше робот отклоняется от заданного курса, тем активнее должны работать моторы, выравнивая его.
2. Движение по линии с одним датчиком освещенности с помощью П-регулятора
Движение по границе черного и белого тоже можно построить на П-регуляторе. Хотя внешне задача представляется решаемой только с помощью релейного регулятора, поскольку в системе присутствует всего два видимых человеческому глазу состояния: черное и белое. Но робот все видит иначе, для него отсутствует резкая граница между этими цветами. Можно сказать, он близорук и видит градиентный переход оттенков серого.
Вот это и поможет построить П-регулятор.
Определяя состояние работа как показания датчика освещенности, научимся оказывать пропорциональное управляющее воздействие на моторы по следующему закону: e=s1-grey, где s1 - текущие показания датчика, а grey - заданное значение.

3. Калибровка датчика
Обратимся к числу 48, использованному в формуле. Это среднее арифметическое показание датчика освещенности на черном и на белом, например (40+56)/2=48. Однако показания датчиков часто меняются по разным причинам: другая поверхность, изменение общей освещенности в помещении, небольшая модификация конструкции и т.п. Поэтому имеет смысл научить робота самостоятельно вычислять среднее арифметическое, то есть значение границы белого и черного.
Способ I. Есть несколько способов выполнить калибровку датчика. В простейшем случае вместо вычисления среднего арифметического просто понижается значение белого. Робот снимает показание белого, вычитает из него некоторое предполагаемое значение (в данном примере на 8) и полученное число считает границей черного и белого.


Вообще говоря, в RobotC требуется инициализация датчика. Произвести ее можно в меню Robot --> Motors and Sensors Setup. В качестве типа датчика устанавливается Light Active.
Способ II. Надо иметь в виду, что такой способ калибровки не учитывает все возможные варианты, а только экономит время на программирование и отладку. Если же времени достаточно, есть другой способ, при котором действительно производится расчет среднего арифметического.

Улучшение способа II. Предложенный алгоритм обладает некоторым неудобством: при запуске потребуется быть внимательным и не пропустить звукового сигнала, после которого робота надо переместить так, чтобы датчик освещенности оказался над белым полем. Вначале робот должен стоять точно над черной линией. Сразу после второго звукового сигнала робот начнет движение.
Процесс калибровки можно сделать управляемым. Для этого после каждого считывания данных необходимо вставить ожидание какого-либо внешнего события, например, нажатия на датчик касания (который необходимо установить на корпус робота и подключить к соответствующему порту).

Запускать программу имеет смысл, аккуратно установив тележку с датчиком освещенности над черной линией.
Лучшее время по результатам этого урока 26 сек. (Галузин А. и Григорьев А.).
Комментариев нет:
Отправить комментарий